Physicists think we’ve detected the dark energy ripping our universe apart
Did you know Neural is taking the stage this fall ? Together with an amazing line-up of experts, we will explore the future of AI during TNW Conference 2021. Secure your online ticket now !

A team of researchers led by physicists at the University of Cambridge may have accidentally stumbled upon the biggest (as in, size-wise) discovery in the history of physics: dark energy.
And not a moment too soon, as many scientists believe this mysterious force is literally ripping the universe apart .
Up front: Scientists believe the universe is made up of matter, dark matter, and dark energy. Matter makes up everything we can see, which is only about 5% of the universe. Dark energy makes up the lion’s share of the rest of the universe and dark matter comprises about 27%.
Unfortunately, dark energy and dark matter are only hypothetical at this point. The theories behind them are quite strong. In fact the generally accepted model of the universe which includes the Big Bang, called The Standard Model , relies on the expected existence of something to explain why all matter doesn’t just fly apart in space — and dark matter is the prime candidate.
We’re pretty sure it’s there. We think we know how to find it. But we need better technology.
Background: The Cambridge team was looking for dark matter when they sort of stumbled across evidence for dark energy.
Since direct observation of dark matter isn’t possible with modern sensor technology, the big idea is to look for evidence of its interaction with matter.
The physicists conducted an experiment that involved catching interactions between dark matter and the sun, which acts as a sort of filter that slows dark particles down enough that they can, potentially, be measured on Earth.
It’s a sort of negative photo of an observation experiment, in that they’re looking for evidence of anomalous gravity occurrences that indicate unseen forces.
Well, they went looking for dark matter but when the numbers came back they were even more anomalous than expected. And this led the team to spend the next year determining what the heck they were looking at.
As it turns out, they believe it’s evidence of dark energy at work.
Why does it matter? The reason scientists believe dark matter exists is because there appears to be an invisible force acting outside of gravity that keeps the stuff in the universe stuffed together.
We’re pretty certain the universe is expanding, and there’s strong evidence to support the idea that the rate at which it’s expanding is increasing.
So dark matter keeps matter from getting tugged along with the universe’s expansion. And… (cue dramatic music) dark energy is what’s believed to be driving the expansion.
Basically there’s a material force keeping matter in place while a dark energy appears to be ripping the universe to shreds.
What? Imagine the universe is pool of water with tiny plastic boats floating in it. One invisible force is causing the pool to expand and become larger while another invisible force holds the plastic boats in place. Eventually, you’ll have an infinitely large pool of water inhabited by objects between which lies an infinite amount of space.
Quick take: This is super cool. Figuring out what dark matter and dark energy are, how to detect them, and gleaning ground-truth data insights from their actual study could be the biggest scientific breakthrough in the history of astronomy and physics.
It’s like humankind’s been living in a giant, pitch-black warehouse for our entire existence as a species and we’re about to turn the overhead lights on.
But we’re still going to have to wait for peer-review and reproductions – and as you can imagine studying dark matter particles bouncing off the sun isn’t exactly something any old university’s science department can do. It could be a year or more before the results are confirmed.
Read the whole paper here .
Here’s how deep learning helps computers detect objects
Deep neural networks have gained fame for their capability to process visual information. And in the past few years, they have become a key component of many computer vision applications .

Among the key problems neural networks can solve is detecting and localizing objects in images. Object detection is used in many different domains, including autonomous driving , video surveillance, and healthcare.
In this post, I will briefly review the deep learning architectures that help computers detect objects.
Convolutional neural networks
One of the key components of most deep learning–based computer vision applications is the convolutional neural network (CNN). Invented in the 1980s by deep learning pioneer Yann LeCun , CNNs are a type of neural network that is efficient at capturing patterns in multidimensional spaces. This makes CNNs especially good for images, though they are used to process other types of data too. (To focus on visual data, we’ll consider our convolutional neural networks to be two-dimensional in this article.)
Every convolutional neural network is composed of one or several convolutional layers , a software component that extracts meaningful values from the input image. And every convolution layer is composed of several filters, square matrices that slide across the image and register the weighted sum of pixel values at different locations. Each filter has different values and extracts different features from the input image. The output of a convolution layer is a set of “feature maps.”
When stacked on top of each other, convolutional layers can detect a hierarchy of visual patterns. For instance, the lower layers will produce feature maps for vertical and horizontal edges, corners, and other simple patterns. The next layers can detect more complex patterns such as grids and circles. As you move deeper into the network, the layers will detect complicated objects such as cars, houses, trees, and people.

Most convolutional neural networks use pooling layers to gradually reduce the size of their feature maps and keep the most prominent parts. Max-pooling, which is currently the main type of pooling layer used in CNNs, keeps the maximum value in a patch of pixels. For example, if you use a pooling layer with a size 2, it will take 2×2-pixel patches from the feature maps produced by the preceding layer and keep the highest value. This operation halves the size of the maps and keeps the most relevant features. Pooling layers enable CNNs to generalize their capabilities and be less sensitive to the displacement of objects across images.
Finally, the output of the convolution layers is flattened into a single dimension matrix that is the numerical representation of the features contained in the image. That matrix is then fed into a series of “fully connected” layers of artificial neurons that map the features to the kind of output expected from the network.
The most basic task for convolutional neural networks is image classification, in which the network takes an image as input and returns a list of values that represent the probability that the image belongs to one of several classes.
For example, say you want to train a neural network to detect all 1,000 classes of objects contained in the popular open-source dataset ImageNet . In that case, your output layer will have 1,000 numerical outputs, each of which contains the probability of the image belonging to one of those classes.
You can always create and test your own convolutional neural network from scratch. But most machine learning researchers and developers use one of several tried and tested convolutional neural networks such as AlexNet, VGG16, and ResNet-50.
Object detection datasets
While an image classification network can tell whether an image contains a certain object or not, it won’t say where in the image the object is located. Object detection networks provide both the class of objects contained in an image and a bounding box that provides the coordinates of that object.
Object detection networks bear much resemblance to image classification networks and use convolution layers to detect visual features. In fact, most object detection networks use an image classification CNN and repurpose it for object detection.
Object detection is a supervised machine learning problem, which means you must train your models on labeled examples. Each image in the training dataset must be accompanied with a file that includes the boundaries and classes of the objects it contains. There are several open-source tools that create object detection annotations.
The object detection network is trained on the annotated data until it can find regions in images that correspond to each kind of object.
Now let’s look at a few object-detection neural network architectures.
The R-CNN deep learning model
The Region-based Convolutional Neural Network (R-CNN) was proposed by AI researchers at the University of California, Berkley, in 2014. The R-CNN is composed of three key components.
First, a region selector uses “selective search,” algorithm that find regions of pixels in the image that might represent objects, also called “regions of interest” (RoI). The region selector generates around 2,000 regions of interest for each image.
Next, the RoIs are warped into a predefined size and passed on to a convolutional neural network. The CNN processes every region separately extracts the features through a series of convolution operations. The CNN uses fully connected layers to encode the feature maps into a single-dimensional vector of numerical values.
Finally, a classifier machine learning model maps the encoded features obtained from the CNN to the output classes. The classifier has a separate output class for “background,” which corresponds to anything that isn’t an object.
The original R-CNN paper suggests the AlexNet convolutional neural network for feature extraction and a support vector machine (SVM) for classification. But in the years since the paper was published, researchers have used newer network architectures and classification models to improve the performance of R-CNN.
R-CNN suffers from a few problems. First, the model must generate and crop 2,000 separate regions for each image, which can take quite a while. Second, the model must compute the features for each of the 2,000 regions separately. This amounts to a lot of calculations and slows down the process, making R-CNN unsuitable for real-time object detection. And finally, the model is composed of three separate components, which makes it hard to integrate computations and improve speed.
Fast R-CNN
In 2015, the lead author of the R-CNN paper proposed a new architecture called Fast R-CNN , which solved some of the problems of its predecessor. Fast R-CNN brings feature extraction and region selection into a single machine learning model.
Fast R-CNN receives an image and a set of RoIs and returns a list of bounding boxes and classes of the objects detected in the image.
One of the key innovations in Fast R-CNN was the “RoI pooling layer,” an operation that takes CNN feature maps and regions of interest for an image and provides the corresponding features for each region. This allowed Fast R-CNN to extract features for all the regions of interest in the image in a single pass as opposed to R-CNN, which processed each region separately. This resulted in a significant boost in speed.
However, one issue remained unsolved. Fast R-CNN still required the regions of the image to be extracted and provided as input to the model. Fast R-CNN was still not ready for real-time object detection.
Faster R-CNN
Faster R-CNN , introduced in 2016, solves the final piece of the object-detection puzzle by integrating the region extraction mechanism into the object detection network.
Faster R-CNN takes an image as input and returns a list of object classes and their corresponding bounding boxes.
The architecture of Faster R-CNN is largely similar to that of Fast R-CNN. Its main innovation is the “region proposal network” (RPN), a component that takes the feature maps produced by a convolutional neural network and proposes a set of bounding boxes where objects might be located. The proposed regions are then passed to the RoI pooling layer. The rest of the process is similar to Fast R-CNN.
By integrating region detection into the main neural network architecture, Faster R-CNN achieves near-real-time object detection speed.
YOLO
In 2016, researchers at Washington University, Allen Institute for AI, and Facebook AI Research proposed “You Only Look Once” ( YOLO ), a family of neural networks that improved the speed and accuracy of object detection with deep learning.
The main improvement in YOLO is the integration of the entire object detection and classification process in a single network. Instead of extracting features and regions separately, YOLO performs everything in a single pass through a single network, hence the name “You Only Look Once.”
YOLO can perform object detection at video streaming frame rates and is suitable applications that require real-time inference.
In the past few years, deep learning object detection has come a long way, evolving from a patchwork of different components to a single neural network that works efficiently. Today, many applications use object-detection networks as one of their main components. It’s in your phone, computer, car, camera, and more. It will be interesting (and perhaps creepy) to see what can be achieved with increasingly advanced neural networks.
Facebook’s using AI to find scammers and imposters on Messenger
Facebook is using AI to spot scammers and imposters on Messenger — without reading your chats.
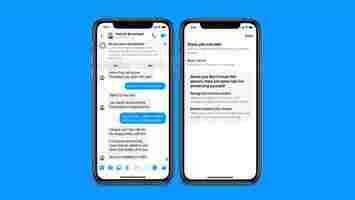
The feature uses machine learning to detect suspicious activity, such as adults sending out loads of friend or message requests to children.
When it spots suspect behavior, it sends an in-app warning to the top of the conversation. This prompts users to block or ignore shady accounts, and provides tips on how to avoid potential scams.
Facebook says the feature doesn’t need to look at the messages themselves. Instead, it searches for behavioral signals such as sending out numerous requests in a short period of time.
That means it will work when Messenger becomes end-to-end encrypted , Facebook messaging privacy chief Jay Sullivan said in a statement :
Facebook’s safety strategy
Facebook has chosen not to automatically block suspicious accounts that the new feature flags. Instead, it will prompt users to make their own informed decisions.
This approach is similar to the alerts Facebook now sends to users who interact with coronavirus misinformation , which direct them to a myth-debunking webpage.
Stephen Balkam, CEO of the Family Online Safety Institute, said he approved of the strategy:
Facebook started rolling out the new feature on Android in March and will add it to iOS next week.